ScalABLE4.0 Cobot, a new level of adaptability and scalability for manufacturing lines.
The ScalABLE4.0 cobot platform was developed in the ScalABLE 4.0 project to demonstrate and validate the developed concepts capable of bringing a new level of adaptability and scalability to manufacturing lines. By integrating the cyber-physical system, composed by flexible robotics and sensing equipment, as well as manufacturing execution systems (MES), it becomes possible to dynamically adapt production lines to market changes in a shorten setup-time. Moreover, and for this reconfiguration to be possible, the introduction of plug’n’produce technologies was mandatory so robots can be quickly moved from one workstation to another to execute the task that will fit it better at that production time.

Cobot Platform
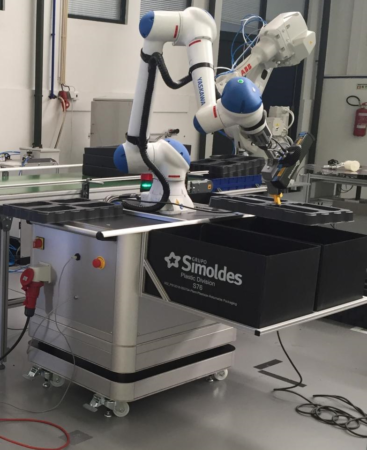
To demonstrate and validate the developed concepts, a modular approach was used in the development of the ScalABLE4.0 cobot platform. This modularity divides the ScalABLE4.0 platform into two modules, mobility, and execution. The mobility module can have the traction unit if it is to be autonomous (AGV). The execution module can be different depending on: the robot controller (different height), the operations to perform (can have or not sensors, tool changer station, or even specific places for boxes, for example), and the type of platform (in the autonomous will not have the bar for the human to push).
Collaborative
Collaboration was always a keyword for the development of this product. The capacity to have collaborative operations between robots and humans creates a more flexible system, and therefore, can fill existing production-related gaps in multiple scenarios.
Using safety lasers in the robotic platforms is possible to define the sensor zones according to the workstation where the robot is operating. This allows the ScalABLE4.0 cobot platform to operate at a collaborative speed when the human worker is inside the working area, and without the presence of the operator to increase the robot’s speed. Moreover, and due to the nature of collaboration capabilities in the selected robotic arms (YASKAWA HC10 and KUKA LBR iiwa), it is also possible to make use of their internal force sensors to detect the contact with the human operator and stop.
Final Results
Intelligent robotics, outstanding productivity!
Furthermore: sarkkis.robotics@sarkkis.com
© 2025 SARKKIS-Robotics All Rights Reserved.