Robotics, Welding and Knowledge, for the future of robotic welding.
Welding is one of the traditional applications of industrial robots but its application to the production of small series is still limited. Main reasons for this are the limitations in offline programming, namely automatic path planning, the calibration of the system and the welding parametrization. The Trilogy pilot will combine automatic robot program generation, with advanced sensing and machine learning for welding parametrization to fully exploit the potential of robotized welding in small batches.
The objective of the Trilogy pilot is the development of a flexible welding robotized system, through the introduction of (knowledge based) decision support for welding parametrization in an advanced robotic work cell, in combination with advanced (collision free) offline programming and advanced sensing.
By selecting a specific application area, structural steel, the Trilogy pilot will reduce the degree of complexity during the development, paving the way for the introduction of knowledge based welding in the arc welding sector.
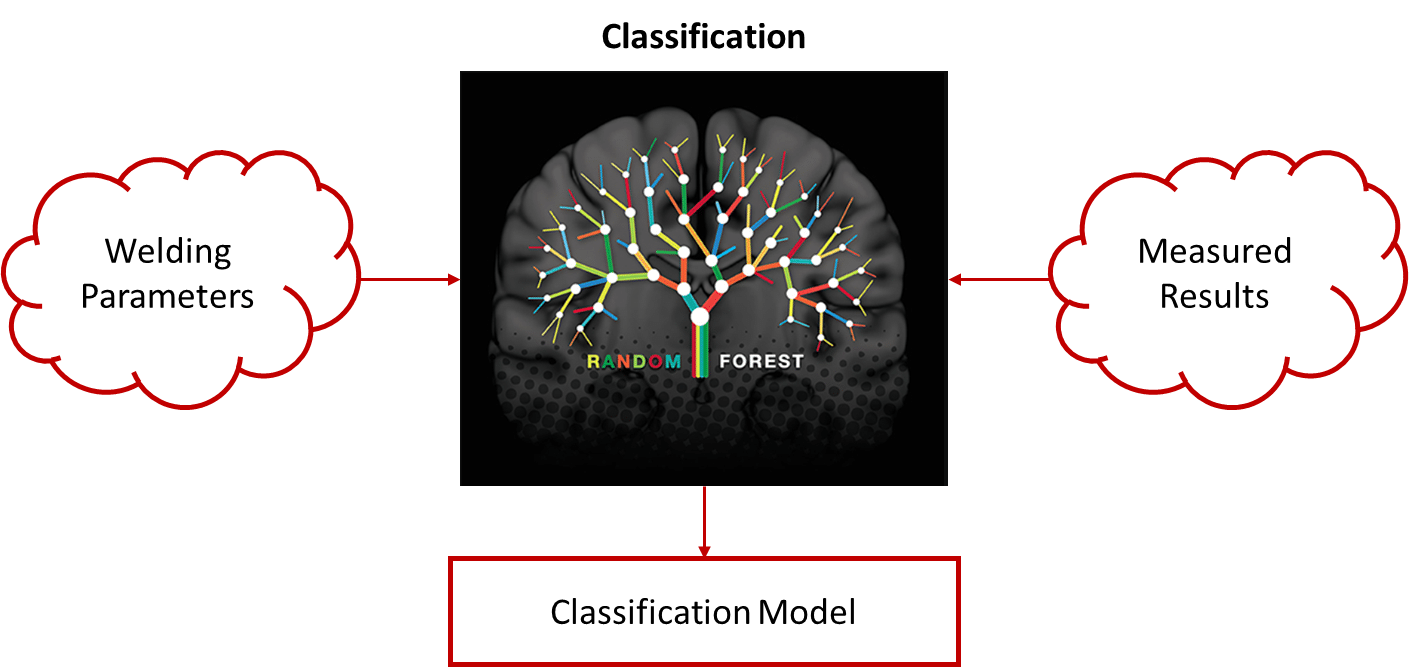
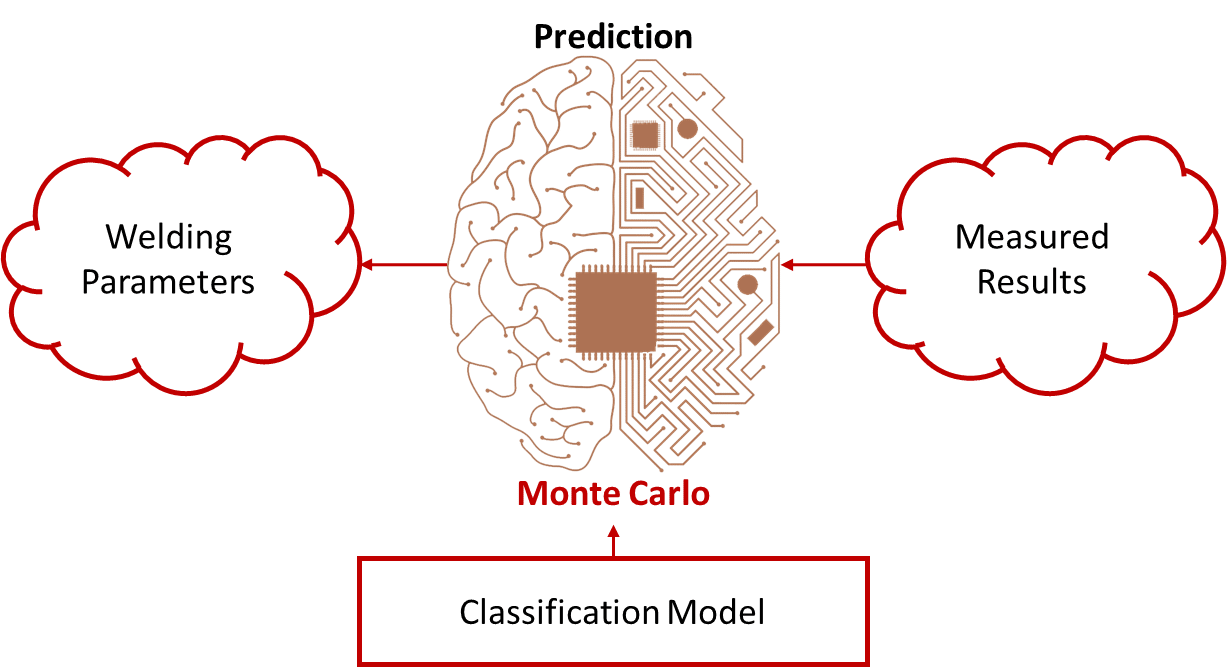
Addressing this problem is the main challenge of the Trilogy pilot by providing a machine learning system, that receives inputs from the process, from sensors and from the expert operator and will work as a decision support tool for the operator in subsequent setups. The underlying element for the machine learning system is an ontology for the welding in the structural steel sector, that is also a contribution of the Trilogy project.
Intelligent robotics, outstanding productivity!
Furthermore: sarkkis.robotics@sarkkis.com
© 2025 SARKKIS-Robotics All Rights Reserved.